


KYXLMD机器人码垛机
一、概述
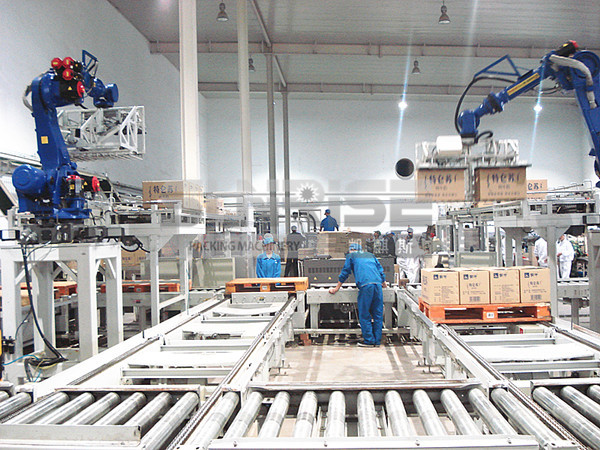
该设备是我公司自行设计的机器人码垛系统,该系统是以机器人为运行主体,配以输送及规整辅助设备完成产品码垛工艺的一套智能化控制系统。该机器人码垛系统具有产品适应性强,多规格兼容能力强,系统维护方便等诸多优势,相对于常规码垛设备,机器人码垛系统可同时满足多条生产线并且是多种类产品的同时码垛。
该机器人自动码垛系统包括:箱体输送系统、箱体整理系统、机器人夹具、机器人系统、托盘输送系统、托盘缓冲系统等。产品纸箱经自动封箱机或者膜包机后由箱体输送系统输送至箱体整理系统,经过整理排列后由机器人通过夹具将产品抓取,抓取后的产品按产品码放需求逐层码垛,码垛完成后由托盘输送系统输送到叉车接货点等待接货或者与自动立体库对接。根据系统生产速度要求可单独配置空托盘自动输送站,也可以采用机器人供应垛板。
二、主要技术参数
1、箱体尺寸:根据客户要求(长宽高)
2、箱体重量:根据客户要求(公斤)
3、单线生产速度:根据客户要求(箱/分钟)
4、码垛方式:根据客户要求(箱/层,共几层)
5、托盘尺寸:标准托盘尺寸(L1200*W1000*H150mm),可根据客户要求
6、每天工作时间:20小时/天
7、工作环境温度:0-40℃
8、相对湿度:≤85%
9、产品损坏率:每小时小于万分之一
10、电气控制系统配置要求:
电控箱及其他电器部位必须满足IP55防水等级,且必须有效接地措施。设备配置有效的安全防护措施,不允许存在安全隐患,例如机器人工作区域设置安全护栏及光栅电眼,设置安全门及急停设施,满足GB/T 8196-2003《机械安全 防护装置 固定式和活动式防护装置设计与制造一般要求》的现行标准。
三、码垛工艺
1、一对一码垛方式:
机器人系统同时对一条箱体输送线输送来的产品进行码
2、二合一码垛方式:
机器人系统同时对两条箱体输送线输送来的产品进行码垛,两条输送线输送的产品规格可以不同,在抓取不同规格产品时机器人系统自动切换控制程序,机器人夹具根据产品规格自动切换,无需人为干预。能否配置二合一码垛方式要根据总的生产速度、码垛方式等具体参数进行计算。
3、三合一码垛方式:
机器人系统同时对三条箱体输送线输送来的产品进行码垛,三条输送线输送的产品规格可以不同,在抓取不同规格产品时机器人系统自动切换控制程序,机器人夹具根据产品规格自动切换,无需人为干预。能否配置三合一码垛方式要根据总的生产速度、码垛方式等具体参数进行计算。
4、四合一码垛方式:
机器人系统同时对四条箱体输送线输送来的产品进行码垛,四条输送线输送的产品规格可以不同,在抓取不同规格产品时机器人系统自动切换控制程序,机器人夹具根据产品规格自动切换,无需人为干预。能否配置四合一码垛方式要根据总的生产速度、码垛方式等具体参数进行计算。
四、系统设备技术参数及配置
1、控制柜及电气元件
(1)控制内配套电线、电器元件选用进口或者合资品牌,保证使用寿命和使用性能,具体配置为:
德国西门子S7-300PLC、触摸屏;DANFOSS变频器;施耐德低压电气元件;日本和泉继电器;德国SICK、日本OMRON传感器;日本SMC汽缸及电磁阀;德国施耐德按钮开关
(2)控制柜及其他电器安装部位具备防水措施,满足IP55防水等级,并且有效地接地措施,电气安装符合国家标准。
(3)控制及系统配线采用三相5线制,零线与地线分开。
(4)电器元件通过导轨安装在控制箱内,拆装方便。
(5)钥匙开关、操作按钮、指示灯等都安装在操作面板上,结构紧凑美
(6)另安装有安全保护的气电转换器,集成电磁阀,霍尔开关等元件。
(7)系统中所有布线、布管合理、美观、整齐;所有需要转节信号源全部采用密封电气盒进行中转连接;所有信号点明确表明编号,方便维修更换。
2、输送机
(1)输送机框架:STS304不锈钢机架,不锈钢厚度2.5mm
(2)滚筒:滚筒采用STS304不锈钢滚筒,滚筒齿轮全部使用碳钢材质,
(3)输送机支腿:采用不锈钢方管焊接,加装万向调节地脚
(4)驱动电机:台湾鑫台创齿轮马达
(5)电机及链条驱动部分全部采用安全罩防护
3、规整平台
(1)规整平台采用不锈钢方管焊接支架
(2)规整平台采用不锈钢滚筒输送整理纸箱
(3)规整平台上安装纸箱转向装置,分缝装置
(4)规整平台上安装推箱汽缸,将规整完成的纸箱推送到抓箱平台
(5)规整平台上配套使用包胶滚筒进行纸箱分缝输送,保证规整计数的准确性,安全性
(6)规整平台的规整区与抓箱区分离,及规整完成后,推箱装置将纸箱推送到指定的抓箱区域,规整平台可继续进行后续纸箱的规整处理
(7)规整平台上安装有自动堵箱报警检测系统,当规整平台出现故障后,规整平台停止运行并发出报警提示。
(9)规整平台上安装有超出检测系统,当规整的纸箱排列发生变形,不能满足机器人进行正常抓取时,规整平台发出报警,机器人停止抓取该平台的产品,并发出报警提示
(10)规整平台上安装有安全操作按钮,当安全操作按钮按下后,操作人员才可以对规整平台进行人工处理工作,安全操作按钮按下后,机器人停止抓取该规整位的产品。
(11)规整平台采用错位布置,保证机器人可以同时抓取三个工位的产品
4、机器人夹具
机器人夹具采用高强度的航空铝型材整体切割制造,机器人夹具叉子
采用无缝不锈钢管制作,强度高,耐用性强;驱动汽缸采用日本SMC产品。夹具分为整层式夹具和版层式夹具。
5、系统能耗:16KW,机器人:7.5KW;输送系统8.5KW。




 苏公网安备 32132302010259号
苏公网安备 32132302010259号
 拨打电话
拨打电话